Mobil robotik sistemlerde tahrik tekerlekleri sadece mekanik bileşenler değildir. Mühendislik açısından bakıldığında, robot tahrik tekerlekleri, tüm hareket kontrol zincirinin son yürütme birimi olarak işlev görür ve taşıma kapasitesini, hareket stabilitesini, konumlandırma doğruluğunu ve uzun vadeli sistem güvenilirliğini doğrudan etkiler.
1. Robot Tahrik Tekerleklerinin Sistem Düzeyindeki Rolü
Bir tahrik tekerleği aynı anda tork iletimi, hareket yürütme ve zemin etkileşimini gerçekleştirir. Performansı, aşağıdakiler de dahil olmak üzere birden fazla sistem parametresiyle uyumlu olmalıdır:
-
Toplam robot ağırlığı ve nominal taşıma kapasitesi
-
Hedef hız ve ivme profilleri
-
Zemin koşulları ve sürtünme özellikleri
-
Kontrol mimarisi (açık döngü ve kapalı döngü)
Bu nedenle deneyimli robot üreticileri tekerlekleri nadiren tek başına seçerler. Bunun yerine, tüm tahrik tekerleği modülünü hareket sisteminin bir parçası olarak değerlendirirler.
2. Yapısal Seçimler ve Robot Performansı Üzerindeki Etkileri
Farklı robot tahrik tekerleği konfigürasyonları, farklı şasi tasarım felsefelerini yansıtır:
-
Diferansiyel tahrik tekerlekleri
Kanıtlanmış ve uygun maliyetli, tahmin edilebilir yollara sahip lojistik robotlar için uygundur.
Yüksek güvenilirlik sunarlar ancak kapalı ortamlarda manevra kabiliyetleri sınırlıdır. -
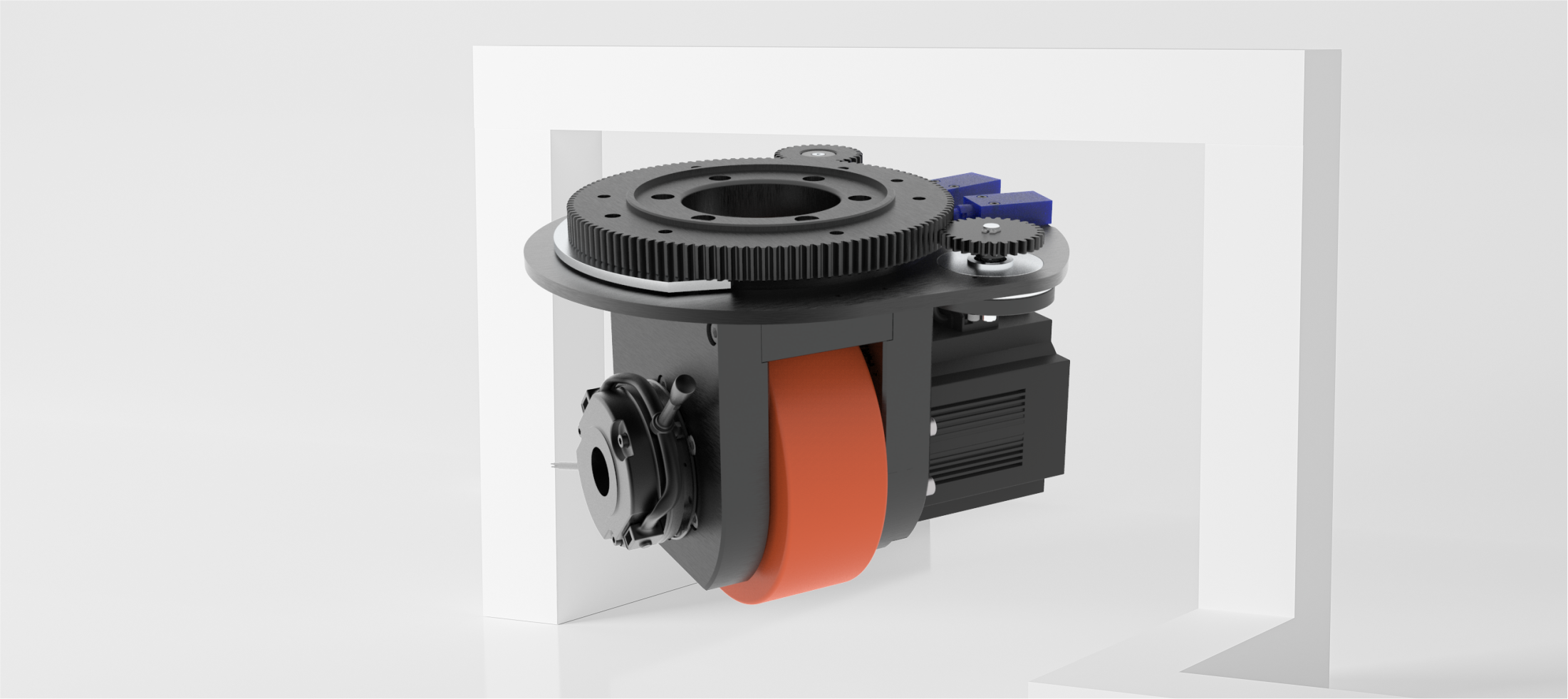
Yönlendirilebilir tahrik tekerlekleri
Yönlendirme ve sürüş fonksiyonlarını ayırarak, bu çözümler daha akıcı hareket kontrolü ve daha yüksek konumlandırma doğruluğu sağlar.
Genellikle orta ve üst düzey AGV ve AMR platformlarında kullanılırlar. -
Çok yönlü tekerlek sistemleri
Maksimum esneklik için tasarlanmış, ancak kontrol algoritmaları, mekanik rijitlik ve tekerlek tutarlılığı açısından zorlayıcıdırlar.
Tahrik tekerleği mimarisi bir kez tanımlandığında, kontrol mantığı veya mekanik düzendeki sonraki ayarlamalar kısıtlanır, bu da erken aşamadaki kararları kritik hale getirir.
3. Yük ve Tork Eşleşmesi: Sıkça Küçümsenen Bir Risk
Birçok tahrik tekerleği arızası yetersiz tork marjlarından kaynaklanır.
Gerçek dünya uygulamalarında, mühendisler nominal yük değerlerinden daha fazlasını hesaba katmalıdır:
-
Hızlanma ve frenleme sırasındaki geçici yükler
-
Zemin sürtünmesindeki değişimler
-
Tekerlek çapının çıkış kuvveti üzerindeki etkisi
-
Sürekli çalışma altında termal bozulma
Pratik bir mühendislik kılavuzu, ideal olmayan koşullar altında istikrarlı performans sağlamak için %20-30 tork rezervi bulundurmaktır.
4. Entegre Tahrik Tekerleği Modüllerinin Mühendislik Avantajları
Geleneksel ayrık çözümlerle karşılaştırıldığında, entegre robot tahrik tekerlekleri ölçülebilir faydalar sunar:
-
Azaltılmış kurulum ve devreye alma süresi
-
Standartlaştırılmış mekanik ve elektriksel arayüzler
-
Birden fazla robotta geliştirilmiş tutarlılık
Teslimat verimliliğini ve uzun vadeli güvenilirliği önceliklendiren üreticiler için, entegre tahrik tekerleği çözümleri giderek tercih edilen seçenek haline gelmektedir.
5. Uygulama Odaklı Seçim Stratejisi
Robot tahrik tekerlekleri için evrensel bir çözüm yoktur. Seçim her zaman uygulama gereksinimlerine göre yapılmalıdır:
-
Depo ve lojistik robotları: güvenilirliğe ve bakım verimliliğine odaklanın
-
Üretim hattı ve kenetleme uygulamaları: konumlandırma doğruluğunu ve tekrarlanabilirliği vurgulayın
-
Ağır hizmet veya sürekli çalışma senaryoları: termal yönetimi ve dayanıklılığı önceliklendirin
Robot tahrik tekerleklerini sistem düzeyinde anlamak, mühendislerin genel konfigürasyonlara güvenmek yerine bilinçli, uygulamaya özel kararlar vermesini sağlar.
Tahrik tekerlekleri aksesuar değildir; robotun hareket kalitesini tanımlarlar.
Paylaşmak:
Diferansiyel Tahrik vs Yönlendirme Tahriki vs Çok Yönlü Tekerlekler: AGV Tahrik Tekerleği Seçimi Üzerine Bir Mühendislik Perspektifi
AGV Forklift Uygulamaları için Yönlendirici Tahrik Tekerleklerinin Mühendislik Konfigürasyonu