En los sistemas robóticos móviles, las ruedas motrices no son meramente componentes mecánicos. Desde un punto de vista de ingeniería, las ruedas motrices de los robots funcionan como la unidad de ejecución final de toda la cadena de control de movimiento, influyendo directamente en la capacidad de carga útil, la estabilidad del movimiento, la precisión de posicionamiento y la fiabilidad del sistema a largo plazo.
1. El papel de las ruedas motrices de los robots a nivel de sistema
Una rueda motriz realiza simultáneamente la transmisión de par, la ejecución de movimiento y la interacción con el suelo. Su rendimiento debe alinearse con múltiples parámetros del sistema, incluyendo:
-
Peso total del robot y carga útil nominal
-
Perfiles de velocidad y aceleración objetivo
-
Condiciones del suelo y características de fricción
-
Arquitectura de control (bucle abierto vs. bucle cerrado)
Por eso, los fabricantes de robots experimentados rara vez seleccionan ruedas de forma aislada. En su lugar, evalúan el módulo completo de la rueda motriz como parte del sistema de movimiento.
2. Opciones estructurales y su impacto en el rendimiento del robot
Las diferentes configuraciones de ruedas motrices de robots reflejan diferentes filosofías de diseño de chasis:
-
Ruedas motrices diferenciales
Probadas y rentables, adecuadas para robots logísticos con trayectorias predecibles.
Ofrecen alta fiabilidad pero maniobrabilidad limitada en entornos confinados. -
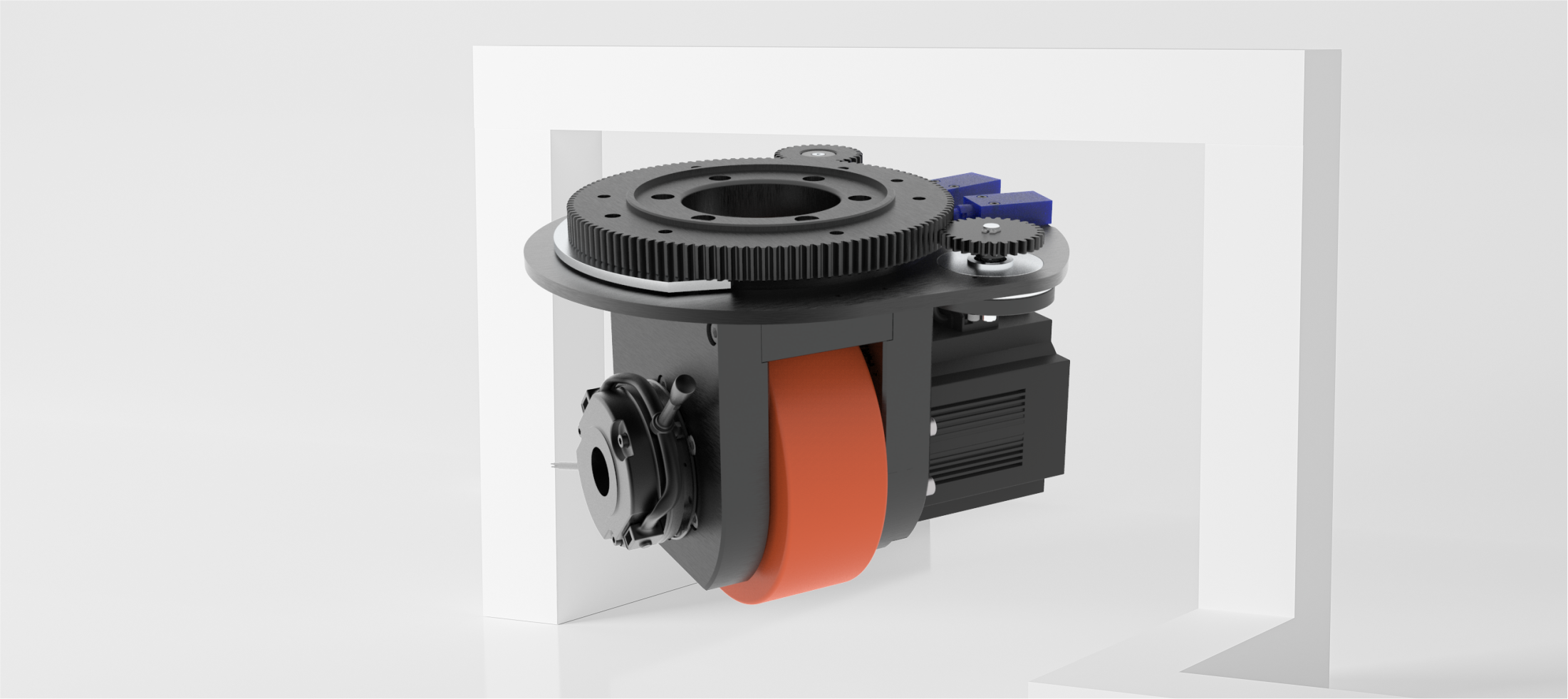
Ruedas motrices direccionales
Al separar las funciones de dirección y tracción, estas soluciones proporcionan un control de movimiento más suave y una mayor precisión de posicionamiento.
Se adoptan comúnmente en plataformas AGV y AMR de gama media a alta. -
Sistemas de ruedas omnidireccionales
Diseñados para una flexibilidad máxima, pero exigentes en términos de algoritmos de control, rigidez mecánica y consistencia de las ruedas.
Una vez que se define la arquitectura de la rueda motriz, los ajustes posteriores en la lógica de control o el diseño mecánico se vuelven limitados, lo que hace que las decisiones en la etapa temprana sean críticas.
3. Emparejamiento de carga y par: un riesgo frecuentemente subestimado
Muchas fallas en las ruedas motrices se originan por márgenes de par insuficientes.
En aplicaciones del mundo real, los ingenieros deben tener en cuenta más que los valores de carga nominales:
-
Cargas transitorias durante la aceleración y el frenado
-
Variaciones en la fricción del suelo
-
La influencia del diámetro de la rueda en la fuerza de salida
-
Degradación térmica bajo operación continua
Una guía práctica de ingeniería es mantener una reserva de par del 20-30%, asegurando un rendimiento estable bajo condiciones no ideales.
4. Ventajas de ingeniería de los módulos de ruedas motrices integrados
En comparación con las soluciones discretas tradicionales, las ruedas motrices integradas para robots ofrecen beneficios medibles:
-
Tiempo de instalación y puesta en marcha reducido
-
Interfaces mecánicas y eléctricas estandarizadas
-
Mejora de la consistencia entre múltiples robots
Para los fabricantes que priorizan la eficiencia de entrega y la fiabilidad a largo plazo, las soluciones de ruedas motrices integradas se están convirtiendo cada vez más en la opción preferida.
5. Estrategia de selección orientada a la aplicación
No existe una solución universal para las ruedas motrices de los robots. La selección siempre debe estar impulsada por los requisitos de la aplicación:
-
Robots de almacén y logística: enfoque en la fiabilidad y la eficiencia del mantenimiento
-
Aplicaciones de línea de producción y acoplamiento: énfasis en la precisión de posicionamiento y la repetibilidad
-
Escenarios de servicio pesado o operación continua: priorizar la gestión térmica y la durabilidad
Comprender las ruedas motrices de los robots a nivel de sistema permite a los ingenieros tomar decisiones informadas y específicas de la aplicación en lugar de depender de configuraciones genéricas.
Las ruedas motrices no son accesorios, definen la calidad del movimiento del robot.
Compartir:
Accionamiento Diferencial vs. Accionamiento por Dirección vs. Ruedas Omnidireccionales: Una Perspectiva de Ingeniería en la Selección de Ruedas Motrices para AGV
Configuración de ingeniería de ruedas motrices de dirección para aplicaciones de carretillas elevadoras AGV