1 Simulación de trayectoria de AGV con accionamiento diferencial unidireccional
El chasis del AGV con accionamiento diferencial unidireccional consta de dos ruedas omnidireccionales, dos ruedas directrices y una unidad motriz. La simulación de la trayectoria del AGV se centra en el segmento de arco de movimiento, ignorando el modelado geométrico durante la etapa de transición angular. En entornos de automatización de almacenes y fabricación de automóviles, esta configuración es ideal por su diseño compacto y su ágil rendimiento de dirección. Gracias a un servoaccionamiento preciso para el control del AGV , las velocidades diferenciales de las ruedas permiten un seguimiento fluido de la trayectoria y un posicionamiento de alta precisión, esenciales para la planificación de trayectorias y los algoritmos de predicción de movimiento.
1.1 Pasos de simulación del segmento de arco de AGV sin carga
1.1.1 Posicionamiento del punto de referencia
Coloque el centro de rotación del AGV con precisión en la línea de arco de RF predefinida. Esto sirve como origen de referencia para la simulación.
1.1.2 Dibujo del círculo de trayectoria del volante
Utilizando el centro de rotación de la unidad como origen del círculo y la distancia a los centros del volante como radio, dibuje el círculo de trayectoria para representar el movimiento.
1.1.3 Alineación de la transmisión
-
Introduzca el comando “AL” y seleccione el mecanismo de accionamiento como objetivo;
-
Definir puntos de origen y destino secuencialmente manteniendo fija la referencia;
-
Seleccione un punto en el extremo inferior de la línea central de la rueda motriz como segunda fuente y cualquier punto en OA como destino;
-
Presione la barra espaciadora dos veces para completar la alineación, asegurando un ajuste preciso entre el eje de transmisión y el círculo de trayectoria.

1.1.4 Calibración de la postura corporal del AGV
-
Dibuje una línea tangente desde el centro del arco;
-
Ejecute el comando “AL” y fije el punto de referencia del AGV;
-
Alinee el centro del volante con el punto tangente para finalizar la calibración.

1.1.5 Definición de zona de peligro
Tomando como origen el centro del círculo, dibuje los círculos interiores y exteriores. El área anular entre ellos representa la zona de peligro del AGV, donde los obstáculos están estrictamente prohibidos.
1.2 Características de simulación con remolque Omniwheel
El remolque omniwheel se mueve en total sincronización postural con el AGV, siguiendo pasos idénticos de simulación de trayectoria del AGV sin calibración adicional de parámetros. Este movimiento sincronizado mejora considerablemente la consistencia de la trayectoria y la estabilidad del sistema en espacios reducidos, típicos de la automatización de almacenes .
Simulación de trayectoria de 2 AGV con remolque no omnirueda
Esta configuración considera el movimiento acoplado del AGV y el remolque, lo que requiere una calibración adicional de la postura del remolque.
2.1 Pasos básicos de simulación
2.1.1 Postura de referencia del AGV
Realice la calibración de la postura corporal del AGV siguiendo el método de simulación sin carga, asegurando la correcta alineación de la orientación.
2.1.2 Calibración del acoplamiento del remolque
Alinee con precisión el centro de acoplamiento del remolque con el centro de la barra de remolque del AGV para mantener la transferencia de fuerza coaxial.
2.1.3 Círculo de trayectoria del volante del remolque
Utilizando el centro de referencia, dibuje un círculo de trayectoria con la distancia al volante del remolque como radio.
2.1.4 Alineación de la postura del remolque
Dibuje una línea tangente, ejecute el comando “AL” y alinee el centro del volante del remolque con el punto tangente para completar la calibración.

2.1.5 Límite y zona de seguridad
Dibuje la línea límite máxima que cubra los contornos del AGV y del remolque; el área encerrada define la zona de peligro donde no se permite ninguna obstrucción.
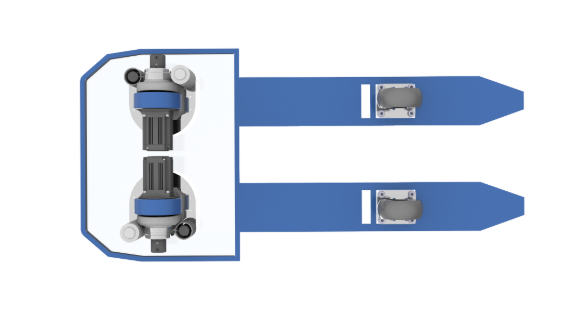
Simulación de trayectoria de AGV con accionamiento diferencial bidireccional 3
El chasis del AGV diferencial bidireccional incorpora cuatro ruedas omnidireccionales y dos unidades de tracción, lo que facilita el movimiento bidireccional. La simulación debe sincronizar los mecanismos de tracción delantero y trasero.
3.1 Pasos de simulación de AGV sin carga
3.1.1 Posicionamiento de la tracción delantera
Coloque el centro de rotación de la transmisión delantera en la línea del arco como base de referencia.
3.1.2 Calibración de la tracción trasera
Usando el centro de la transmisión delantera como origen y la distancia entre los centros de transmisión como radio, dibuje un círculo que interseca el arco. Ejecute "AL" y alinee el centro de la transmisión trasera con la intersección.
3.1.3 Definición de zona de seguridad
Dibuje el límite general del movimiento del AGV para separar las regiones seguras y restringidas.
3.2 Funciones de simulación cargadas
Este tipo de AGV solo admite remolques omniwheel; ambas posturas permanecen sincronizadas, siguiendo la secuencia de simulación del AGV descargado.
Simulación de trayectoria de AGV con volante bidireccional de 4 ejes
Este AGV utiliza cuatro ruedas omnidireccionales y dos módulos de dirección. Los sensores de navegación magnéticos están montados en la carrocería, lo que difiere fundamentalmente de los sistemas de tracción diferencial.
4.1 Pasos de simulación de AGV sin carga
4.1.1 Posicionamiento del sensor frontal
Coloque el sensor de navegación magnético frontal en la línea de arco como referencia de calibración.
4.1.2 Calibración del sensor trasero
Usando el sensor frontal como centro, dibuje un círculo cuyo radio sea la distancia entre los sensores, intersectando la línea del arco. Ejecute "AL" para alinear el centro del sensor trasero con el punto de intersección.

4.2 Simulación de la trayectoria de un carro de materiales con ruedas omnidireccionales
La postura de marcha del carro de material está completamente sincronizada con el AGV. Los pasos de simulación son consistentes con los de un AGV vacío, por lo que no requieren ajustes adicionales de parámetros.
Compartir:
Servomotores y sistemas de accionamiento para AGV: fórmulas de selección, tecnologías clave y aplicaciones industriales
Guía de selección de servomotores: Cómo lograr un control preciso y eficiente