En la automatización de almacenes, el tren de transmisión mueve el vehículo, pero el mecanismo de elevación mueve la mercancía. Tanto para los AMR latentes, las lanzaderas de 4 vías como los AGV de horquilla, el módulo de elevación es el componente que interactúa directamente con la carga útil, ya sea levantando una estantería del suelo, girando una carga para alinearla o elevando un palé a una posición precisa en el estante.
Elegir el mecanismo de elevación adecuado determina no solo la capacidad de carga útil, sino también el rendimiento del ciclo, la precisión del posicionamiento, los requisitos de espacio libre en el suelo y el costo de mantenimiento a largo plazo. Un módulo de elevación que sea demasiado pequeño, esté mal sellado o no esté mecánicamente adaptado al sistema de accionamiento limitará el rendimiento de un AGV que, de otro modo, estaría bien diseñado.
Esta guía está dirigida a ingenieros mecánicos, integradores de sistemas y equipos de compras que evalúan mecanismos de elevación de AGV para nuevas construcciones de automatización o proyectos de actualización. Cubre cómo funcionan las principales arquitecturas de elevación, las especificaciones más importantes, cómo se integran los módulos de elevación con los sistemas de accionamiento y control de AGV, y qué buscar al evaluar a un proveedor.

¿Qué es un mecanismo de elevación AGV y dónde se utiliza?
Un mecanismo de elevación AGV es un módulo de actuación vertical motorizado integrado en un vehículo guiado automatizado o un robot móvil autónomo. Su función es elevar, bajar o girar una carga útil, ya sea la propia plataforma de carga del vehículo, una unidad de estantería o un palé, como parte de un ciclo de manipulación automatizado.
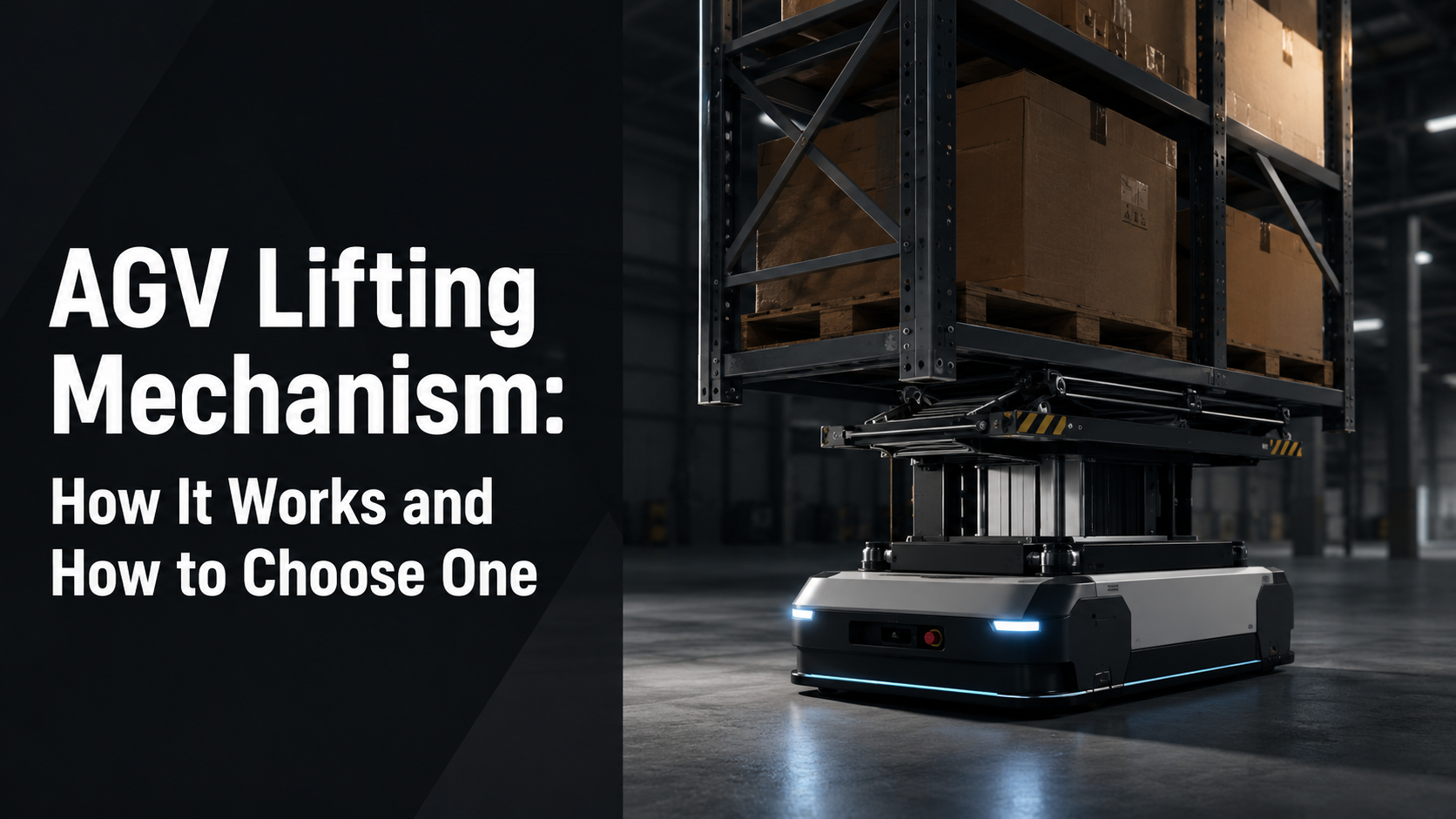
Los mecanismos de elevación aparecen en una amplia gama de tipos de AGV. En los AMR latentes, un módulo de elevación compacto eleva la placa superior del vehículo para levantar una estantería de almacenamiento o una jaula de mercancías del suelo, lo que permite al robot transportar la unidad completa a una estación de preparación de pedidos o a una zona de consolidación. En los AGV de horquilla, una columna de elevación más sustancial eleva las horquillas a alturas precisas para el almacenamiento y la recuperación de palés. En las lanzaderas de 4 vías, los pasadores o plataformas de elevación colocan las cargas en los largueros de los estantes. En los sistemas de manipulación de contenedores, los actuadores de elevación compactos presentan contenedores individuales a las interfaces de los transportadores.
A pesar de estas diferencias de aplicación, todos los mecanismos de elevación de AGV comparten los mismos requisitos de diseño fundamentales: actuación vertical fiable, control de posición preciso, capacidad de carga suficiente y construcción robusta adecuada para ciclos de trabajo industriales continuos.
Cómo funciona el mecanismo de elevación AMR
El mecanismo de elevación AMR, también llamado módulo de elevación AMR latente o gato AGV oculto, es la arquitectura de elevación más ampliamente desplegada en la automatización de almacenes actual. Comprender su principio de funcionamiento aclara por qué ciertas especificaciones son importantes y dónde suelen ocurrir los fallos de diseño.
En un AMR latente, el robot navega por debajo de una unidad de estantería objetivo utilizando un espacio a nivel del suelo diseñado en la base de la estantería. Una vez posicionado, el mecanismo de elevación se activa. Una leva accionada por motor, un disco excéntrico o un mecanismo de tornillo empuja la placa superior del robot hacia arriba con una carrera corta, normalmente de 30 a 80 mm, contactando con la parte inferior de la estantería y levantándola del suelo unos pocos centímetros. El robot transporta entonces la estantería al destino, la baja de nuevo al suelo y se retira.
La carrera de elevación es corta por diseño. Los AMR latentes no necesitan elevar cargas a alturas significativas; solo necesitan separar la estantería del suelo y mantener el espacio libre durante el transporte. Este rango de recorrido compacto permite que el mecanismo de elevación se aloje completamente dentro del chasis del robot, manteniendo el perfil del vehículo lo suficientemente bajo como para operar debajo de las bases de estantería estándar.
Muchos mecanismos de elevación modernos combinan la elevación vertical con la rotación axial, lo que permite al robot girar la estantería a una orientación específica durante el transporte. Esto es particularmente útil en operaciones de picking donde la estantería debe presentar una cara específica al operador o al sistema de picking automatizado.
Tipos clave de sistemas de elevación AGV
Elevación por leva y disco excéntrico
El mecanismo de leva o disco excéntrico convierte la salida rotatoria del motor directamente en movimiento lineal vertical a través de un montaje descentrado o una superficie de leva perfilada. Esta arquitectura es mecánicamente simple, compacta y adecuada para las carreras de elevación cortas requeridas en los AMR latentes. Produce un perfil de movimiento sinusoidal característico, suave al principio y al final del recorrido, lo que reduce la carga de impacto en la estantería y el chasis del robot. La principal limitación es que los mecanismos de leva no son adecuados para longitudes de carrera variables; la altura de elevación está fijada por la geometría de la leva.
Mecanismo de gato de husillo
Los actuadores de husillo o husillo de bolas convierten la rotación del motor en movimiento vertical lineal mediante un eje roscado. Esta arquitectura ofrece una mayor capacidad de carrera, posicionamiento ajustable y alta capacidad de carga en relación con el tamaño del motor. Los gatos de husillo son comunes en los AGV de carretilla elevadora y en las columnas de elevación donde se requiere un posicionamiento preciso de la altura en una amplia gama de elevaciones. La desventaja es una mayor complejidad mecánica y la necesidad de una lubricación y sellado adecuados para mantener el rendimiento en entornos polvorientos o húmedos.
Mecanismo de elevación de tijera
Los mecanismos de elevación de tijera utilizan un bastidor en forma de diamante enlazado para traducir el movimiento horizontal del actuador en movimiento vertical. Proporcionan plataformas de elevación estables en rangos de carrera moderados y pueden diseñarse para una alta capacidad de carga. En aplicaciones AGV, las elevaciones de tijera aparecen principalmente en plataformas de gran carga útil y en AGV de línea de montaje donde una plataforma de trabajo debe elevarse a alturas ergonómicas. Su mayor tamaño los hace menos comunes en AMR de almacén compactos.
Módulo combinado de elevación y rotación
Los módulos integrados de elevación y rotación combinan la elevación vertical con un cojinete giratorio y un sistema de accionamiento en un solo conjunto. El módulo eleva la carga útil y luego la gira a una posición angular objetivo antes del transporte o antes de bajarla en el destino. Esta arquitectura es estándar en aplicaciones de AMR latentes donde la orientación de la estantería debe controlarse y se utiliza cada vez más en operaciones de clasificación y preparación de kits automatizadas. La integración de ambas funciones en un solo módulo reduce el número de interfaces mecánicas, simplifica el diseño del chasis y mejora la fiabilidad en comparación con dos conjuntos de actuadores separados.

Especificaciones críticas a evaluar
Capacidad de carga
La capacidad de carga nominal es la carga útil máxima que el mecanismo de elevación puede elevar y transportar en condiciones de funcionamiento continuas. Para los AMR latentes, las capacidades típicas oscilan entre 300 kg y 1.500 kg, dependiendo del tamaño de la estantería y la densidad de la mercancía. Los mecanismos de elevación deben dimensionarse con un factor de servicio adecuado, típicamente de 1,3 a 1,5, aplicado a la carga útil máxima calculada, teniendo en cuenta las cargas dinámicas durante la aceleración y el giro. Superar la capacidad nominal de forma constante provoca un desgaste prematuro de la leva, el tornillo o los elementos del rodamiento.
Carrera de elevación
La carrera de elevación es la distancia de recorrido vertical desde la posición bajada a la elevada. Para los mecanismos de elevación AMR latentes, son típicas las carreras de 30 a 80 mm, suficientes para separar la estantería del suelo y mantener el espacio libre durante el transporte. Las aplicaciones que requieren un posicionamiento preciso de la altura en rangos más largos, como los AGV de carretilla elevadora que acceden a múltiples niveles de estanterías, requieren carreras significativamente más largas y accionamiento basado en tornillo.
Rango de rotación y precisión de posicionamiento
Para los módulos combinados de elevación y rotación, el rango de rotación y la precisión de posicionamiento angular determinan la capacidad del sistema para orientar las cargas útiles a las posiciones objetivo. La mayoría de las aplicaciones de AMR latentes requieren una capacidad de rotación continua de 360 grados. La precisión del posicionamiento depende de la resolución del codificador y del sistema de control, pero ±1 grado es una especificación común para las aplicaciones de preparación de pedidos estándar; se pueden requerir tolerancias más estrictas para interfaces automatizadas con sistemas de transporte o brazos robóticos.
Velocidad del ciclo
La velocidad del ciclo, el tiempo necesario para completar una secuencia completa de elevación, transporte y descenso, afecta directamente al rendimiento en operaciones de gran volumen. Una actuación más rápida de la leva o el tornillo reduce el tiempo del ciclo, pero aumenta la carga de impacto y el ruido. La velocidad óptima del ciclo equilibra los requisitos de rendimiento con la tensión mecánica y la acústica, especialmente en entornos sensibles al ruido como la logística minorista o farmacéutica.
Clasificación IP y sellado ambiental
El mecanismo de elevación funciona cerca del suelo, donde está expuesto al polvo, escombros, agentes de limpieza y contaminación ocasional por líquidos. IP54 proporciona una protección adecuada para almacenes interiores estándar. Las instalaciones de cadena de frío, los entornos logísticos de alimentos y las operaciones con lavado frecuente de suelos requieren IP65 o superior. Un sellado inadecuado permite la contaminación de rodamientos, husillos y bobinados de motor, lo que se encuentra entre las principales causas de fallo prematuro del mecanismo de elevación en la práctica.
Integración con sistemas de accionamiento y control AGV
El mecanismo de elevación no funciona de forma aislada, debe integrarse mecánica y eléctricamente con el chasis del AGV, el sistema de accionamiento y el controlador de movimiento.
Mecánicamente, el módulo de elevación debe montarse en el chasis del robot con la rigidez suficiente para evitar la deflexión bajo carga. La interfaz de la placa superior debe coincidir con la geometría de la base de la estantería o palé objetivo para asegurar un contacto estable y evitar el deslizamiento lateral durante el transporte. Para los módulos de elevación y rotación, el cojinete giratorio debe soportar tanto el peso de la carga útil como las fuerzas laterales dinámicas que surgen durante el movimiento del robot.
Eléctricamente, el motor de elevación requiere conexiones de alimentación y control del controlador principal del vehículo. La mayoría de los mecanismos de elevación de AGV modernos utilizan servomotores o motores paso a paso con retroalimentación de codificador, lo que permite el control de posición de bucle cerrado tanto de la altura de elevación como del ángulo de rotación. La interfaz de control, típicamente bus CAN, RS485 o E/S digital, debe ser compatible con el controlador de movimiento principal del AGV.
La retroalimentación posicional del mecanismo de elevación también es utilizada por los sistemas de navegación y seguridad del vehículo. La confirmación de que el mecanismo está completamente levantado antes de viajar y completamente bajado antes de que el robot salga de debajo de una estantería es un enclavamiento estándar en los sistemas AMR latentes correctamente diseñados. La falta o la poca fiabilidad de la retroalimentación de posición es una causa común de incidentes de daños en estanterías durante la puesta en marcha.
Qué buscar en un proveedor de mecanismos de elevación AGV
La calidad entre los proveedores de mecanismos de elevación AGV es muy variada. Las especificaciones de los componentes que parecen idénticas en papel pueden diferir sustancialmente en la fiabilidad real, especialmente en los altos recuentos de ciclos típicos de las operaciones de almacén 24/7.
Soporte de ingeniería específico para la aplicación. Un proveedor creíble debería poder revisar su carga útil, ciclo de trabajo y requisitos de integración y recomendar una configuración en lugar de simplemente proporcionar un artículo de catálogo. La selección del mecanismo de elevación implica compensaciones entre la carrera, la velocidad, la capacidad de carga y el tamaño que requieren un juicio de ingeniería, no solo la coincidencia de especificaciones.
Datos probados de pruebas de carga. Los proveedores que confían en la calidad de sus productos deberían poder proporcionar resultados de pruebas de carga y datos de vida útil a la fatiga para sus mecanismos de elevación en ciclos de trabajo representativos. Las pruebas de sobrecarga hasta 1,5 veces la capacidad nominal son un punto de referencia significativo para aplicaciones de AMR latentes donde las sobrecargas ocasionales de carga útil son un riesgo operativo real.
Certificaciones. La certificación ISO 9001 proporciona una garantía básica de que el sistema de calidad de fabricación está documentado y controlado. El marcado CE es relevante para los sistemas desplegados en los mercados europeos. Para la logística alimentaria o las aplicaciones farmacéuticas, pueden ser necesarias certificaciones ambientales adicionales.
Capacidad de personalización. La geometría de la interfaz de la estantería, los patrones de montaje, la longitud de la carrera, el rango de rotación y los requisitos de interfaz del motor varían entre las plataformas AGV. Un proveedor capaz de producir configuraciones específicas de la aplicación sin plazos de entrega prohibitivos añade un valor significativo para los programas de producción en volumen.
Soporte posventa y disponibilidad de repuestos. Los mecanismos de elevación son elementos de desgaste. Las superficies de las levas, los rodamientos, los sellos y las escobillas del motor tienen una vida útil finita. Un proveedor que no puede garantizar la disponibilidad de repuestos o los tiempos de respuesta del soporte técnico presenta un riesgo operativo para los sistemas que funcionan en turnos continuos.

Errores comunes de diseño y especificación
Subdimensionar la capacidad de carga sin factores dinámicos. Calcular la capacidad del mecanismo de elevación solo a partir del peso estático de la estantería ignora las cargas inerciales generadas durante la aceleración, desaceleración y giro del robot. Las cargas máximas reales superan con frecuencia el peso estático en un 20 a 40 por ciento. Los mecanismos dimensionados sin un factor de servicio aplicado a las cargas dinámicas son consistentemente los primeros componentes en fallar en implementaciones de alto rendimiento.
Especificar la longitud de la carrera basándose únicamente en el espacio libre nominal del suelo. La variación de la planitud del suelo, el desgaste de las patas de la estantería y la deflexión de la carga reducen el espacio libre efectivo por debajo de la especificación nominal. La carrera de elevación debe incluir margen para estas variables del mundo real; un mecanismo especificado con la carrera mínima absoluta requerida en un suelo perfectamente plano hará contacto con el suelo en condiciones operativas.
Descuidar la precisión de rotación en operaciones de picking de SKU mixtos. En operaciones donde la orientación de la estantería afecta la ergonomía del picking o la alineación de la interfaz automatizada, el error de posicionamiento angular se acumula a lo largo de los ciclos si el accionamiento de rotación carece de la resolución de codificador adecuada y el ajuste del sistema de control. Esto se descubre típicamente durante la puesta en marcha en lugar de la especificación, y es costoso de corregir en una flota desplegada.
Sellado insuficiente para el entorno operativo real. Especificar IP54 para un almacén nominalmente interior sin tener en cuenta los regímenes de limpieza del suelo, la variación estacional de la humedad o la proximidad del muelle de carga es un error común. Volver a sellar o reemplazar componentes que fallan prematuramente en una flota AGV desplegada representa un costo de mantenimiento significativo.
Preguntas frecuentes
¿Qué capacidad de carga suelen soportar los mecanismos de elevación AGV?
Las capacidades varían ampliamente según el tipo de vehículo. Los mecanismos de elevación AMR latentes suelen soportar de 300 kg a 1.500 kg. Los AGV de carga pesada y los AGV de carretilla elevadora pueden manejar 2.000 kg o más con diseños adecuados de columna de elevación o elevación de tijera. La capacidad correcta para una aplicación dada depende del peso máximo de la estantería o palé, el factor de servicio aplicado para cargas dinámicas y cualquier requisito de crecimiento futuro de la carga útil en el diseño del sistema.
¿Se pueden combinar las funciones de elevación y rotación en un único módulo?
Sí, y esta es la arquitectura estándar para aplicaciones de AMR latentes. Los módulos integrados de elevación y rotación realizan tanto la elevación vertical como el posicionamiento angular en un solo conjunto, reduciendo la complejidad mecánica y el esfuerzo de integración del chasis en comparación con dos sistemas de actuadores separados.
¿Cuál es la carrera de elevación típica para un mecanismo de elevación AMR latente?
La mayoría de las aplicaciones de AMR latentes utilizan carreras de elevación entre 30 mm y 80 mm. Este rango es suficiente para elevar una base de estantería estándar del suelo y mantener el espacio libre durante el transporte. La carrera precisa requerida depende de la geometría de la pata de la estantería, el estado del suelo y cualquier margen de espacio libre obligatorio especificado por el diseñador del sistema o la evaluación de seguridad.
¿Cómo se controla un mecanismo de elevación AGV?
La mayoría de los mecanismos de elevación AGV modernos utilizan un servomotor o motor paso a paso con retroalimentación de codificador, controlado a través del controlador de movimiento principal del vehículo a través de bus CAN, RS485 o E/S digital. El control de posición de bucle cerrado permite comandos precisos de altura de elevación y ángulo de rotación. Los enclavamientos de seguridad confirman el estado del mecanismo (elevado o bajado) antes de ejecutar los comandos de desplazamiento o aproximación a la estantería.
¿Qué certificaciones debo buscar en un proveedor de mecanismos de elevación?
La certificación ISO 9001 garantiza un sistema de calidad de fabricación controlado. El marcado CE es obligatorio para la maquinaria desplegada en los estados miembros de la UE y contribuye a la documentación de cumplimiento general del sistema AGV. Para entornos especializados (procesamiento de alimentos, farmacéuticos o cadena de frío), pueden aplicarse certificaciones adicionales o especificaciones de materiales según los requisitos normativos del mercado objetivo.
Conclusión
El mecanismo de elevación del AGV no es un componente secundario, es la interfaz directa entre el robot y la carga útil, y su rendimiento define la capacidad práctica de todo el sistema. La selección de la arquitectura correcta, la especificación de la capacidad de carga con márgenes dinámicos adecuados, la garantía de un sellado ambiental suficiente y la integración correcta con los sistemas de accionamiento y control del vehículo son todas decisiones que afectan la fiabilidad operativa a largo plazo.
Para los equipos de ingeniería que especifican mecanismos de elevación AMR o módulos de elevación AGV para nuevos proyectos de automatización, la inversión en especificar correctamente en la etapa de diseño rinde beneficios a lo largo de la vida útil operativa de la flota. Un mecanismo de elevación correctamente adaptado a la aplicación es un componente que funciona silenciosamente en segundo plano durante años; uno que es subdimensionado o mal sellado se convierte en la principal preocupación de mantenimiento a los pocos meses de su implementación.
Compartir:
Estructura y principio de funcionamiento de las ruedas de dirección de los AGV robóticos de HKT: desde la propulsión y la dirección hasta la selección personalizada
Guía de proveedores de volantes AGV: Qué saber antes de buscar uno